أدخل كلمة أو عبارة بأي لغة 👆
اللغة:
ترجمة وتحليل الكلمات عن طريق الذكاء الاصطناعي ChatGPT
في هذه الصفحة يمكنك الحصول على تحليل مفصل لكلمة أو عبارة باستخدام أفضل تقنيات الذكاء الاصطناعي المتوفرة اليوم:
- كيف يتم استخدام الكلمة في اللغة
- تردد الكلمة
- ما إذا كانت الكلمة تستخدم في كثير من الأحيان في اللغة المنطوقة أو المكتوبة
- خيارات الترجمة إلى الروسية أو الإسبانية، على التوالي
- أمثلة على استخدام الكلمة (عدة عبارات مع الترجمة)
- أصل الكلمة
%ما هو (من)٪ 1 - تعريف
Управления система с переменной структурой; Адаптивная система (теория управления)
Управления система с переменной структурой
(СПС)



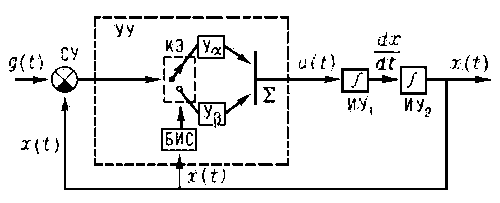

нелинейная система автоматического управления, состоящая из совокупности непрерывных подсистем (называемых структурами) с определённым правилом перехода в процессе функционирования от одной структуры данной совокупности к другой. В СПС устройство управления содержит ключевые элементы, которые разрывают или восстанавливают связи между функциональными элементами системы, изменяя тем самым каналы передачи воздействий и обеспечивая переход от одной структуры системы к другой (рис. 1). Такой принцип построения устройства управления существенно расширяет возможности управления вследствие использования полезных свойств каждой из структур и, кроме того, позволяет получить новые свойства, не присущие ни одной из них.
Особенности СПС можно пояснить на примере простейшей системы автоматического управления (САУ), поведение (движение) которой описывается дифференциальным уравнением
, (1)
где х - управляемая величина, u - управляющее воздействие, t - время. Пусть в САУ (1) возможна реализация лишь положительной (u = βx, β = const > 0) и отрицательной (u = - αх, α = const > 0) обратной связи (См. Обратная связь) (α и β - коэффициент передачи цепи обратной связи). При положительной обратной связи движение САУ описывается уравнением  : (структура I), а при отрицательной
: (структура I), а при отрицательной  (структура II). Для наглядного представления поведения (движения) САУ строят её фазовые портреты (см. Фазовой плоскости метод) для структуры I (рис. 2, а) и структуры II (рис. 2, б).
(структура II). Для наглядного представления поведения (движения) САУ строят её фазовые портреты (см. Фазовой плоскости метод) для структуры I (рис. 2, а) и структуры II (рис. 2, б).
Задача состоит в том, что требуется выбрать такое управление и из класса возможных управлений, при котором система обладает асимптотической устойчивостью. Из анализа фазовых портретов системы следует, что ни положительная, ни отрицательная обратная связь порознь не решает поставленной задачи. Поэтому в соответствии с методами СПС реализуют следующее правило изменения структур:
(2)
, c = const, 0 < c <  .
.
Фазовый портрет такой системы изображен на рис. 2, б; из анализа портрета следует, что изображающая точка из произвольного начального положения попадает на прямую s = 0, проходящую через начало координат, в окрестности которой фазовые траектории направлены навстречу друг другу и, следовательно, изображающая точка не может покинуть эту прямую. Траектория s = 0 не принадлежит ни одной из структур (I или II), поэтому, согласно (2), за счёт переключения управления и в системе происходит смена структур теоретически с бесконечной частотой. Такой режим движения называется скользящим, а за уравнение движения принимается уравнение прямой s = 0:
, c > 0. (3)
Все решения уравнения (3) стремятся к нулю при t → ∞, т. е. поставленная задача решена. Существенно, что движение системы в скользящем режиме не зависит от характеристик объекта управления и коэффициент обратной связи, качество переходного процесса определяется только выбором параметра с.
Рассмотренный пример показывает, что посредством сочетания неприемлемых порознь структур и за счёт использования скользящих режимов можно синтезировать СПС, обладающие рядом положительных свойств, в частности апериодической Устойчивостью и параметрической Инвариантностью. С помощью СПС решается широкий круг задач теории управления, например задачи высококачественного воспроизведения задающего воздействия при инвариантности к параметрическим и внешним возмущениям, многосвязного регулирования, оптимизации и др.
Лит.: Емельянов С. В., Системы автоматического управления с переменной структурой, М., 1967; Системы с переменной структурой и их применение в задачах автоматизации полёта, М., 1968; Теория систем с переменной структурой, М., 1970; Уткин В. И., Скользящие режимы и их применения в системах с переменной структурой, М., 1974.
Б. З. Голембо, С. К. Коровин.
Рис. 1. Функциональная схема системы управления с переменной структурой: УУ - устройство управления; СУ - сравнивающее устройство; КЭ - ключевой элемент; БИС - блок изменения структуры; ∑ - сумматор; Уα - усилитель с коэффициентом передачи α; Уβ - усилитель с коэффициентом передачи β; ИУ - интегрирующие устройства; g(t) - задающее воздействие; u(t) - управляющее воздействие; x(t) - управляемая величина.
Рис. 2. Фазовые портреты систем автоматического управления: а - с положительной обратной связью (структура I); б - с отрицательной обратной связью (структура II); в - с переменной структурой; I - область движения системы со структурой I; II - область движения системы со структурой II; 0 - начало координат; x - управляемая величина; t - время.
Адаптивное управление
Адаптивное управление — совокупность методов теории управления, позволяющих синтезировать системы управления, которые имеют возможность изменять параметры регулятора или структуру регулятора в зависимости от изменения параметров объекта управления или внешних возмущений, действующих на объект управления. Подобные системы управления называются адаптивными. Адаптивное управление широко используется во многих приложениях теории управления.
Грамматика с фразовой структурой
Грамматика с фразовой структурой — формальная грамматика, алгебраическая структура, состоящая из упорядоченной четвёрки G=(N, T, P, S) и определённой на ней неявно операцией конкатенации.
ويكيبيديا
Адаптивное управление
Адаптивное управление — совокупность методов теории управления, позволяющих синтезировать системы управления, которые имеют возможность изменять параметры регулятора или структуру регулятора в зависимости от изменения параметров объекта управления или внешних возмущений, действующих на объект управления. Подобные системы управления называются адаптивными. Адаптивное управление широко используется во многих приложениях теории управления.
