Voer een woord of zin in in een taal naar keuze 👆
Taal:
Vertaling en analyse van woorden door kunstmatige intelligentie ChatGPT
Op deze pagina kunt u een gedetailleerde analyse krijgen van een woord of zin, geproduceerd met behulp van de beste kunstmatige intelligentietechnologie tot nu toe:
- hoe het woord wordt gebruikt
- gebruiksfrequentie
- het wordt vaker gebruikt in mondelinge of schriftelijke toespraken
- opties voor woordvertaling
- Gebruiksvoorbeelden (meerdere zinnen met vertaling)
- etymologie
Wat (wie) is Гидролокация - definitie
СРЕДСТВО ЗВУКОВОГО ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ
Асдик; Сонар; Гидролокация; Эхолот; Гидроакустическая станция; Гидроакустический комплекс; Акустик


![Рубка гидроакустика на подводной лодке [[С-56]] ([[корабль-музей]] во [[Владивосток]]е)](https://commons.wikimedia.org/wiki/Special:FilePath/С-56 рубка акустика.JPG?width=200 "Рубка гидроакустика на подводной лодке [[С-56]] ([[корабль-музей]] во [[Владивосток]]е)")
ГИДРОЛОКАЦИЯ
(от гидро ... и лат. locatio - размещение), определение местонахождения и скорости движения подводных объектов при помощи звуковых сигналов, излучаемых самими объектами (пассивная локация, шумопеленгация) или же в результате отражения от них специально посланных сигналов (активная локация). По скорости распространения звука в воде и промежутку времени между моментами излучения и приема звукового сигнала определяют расстояние до объекта, а по направлению прихода отраженного сигнала - направление на объект. Гидролокацию применяют для обнаружения кораблей (в частности, подводных лодок), косяков рыбы, исследования дна и т. д.
гидролокация
ж.
Определение местоположения и скорости движения тела, находящегося под водой, с помощью отраженных от него или посланных им звуковых сигналов.
Определение местоположения и скорости движения тела, находящегося под водой, с помощью отраженных от него или посланных им звуковых сигналов.
Гидролокация
(от Гидро... и лат. locatio - размещение)
определение положения подводных объектов при помощи звуковых сигналов, излучаемых самими объектами (пассивная локация) или возникающих в результате отражения от подводных объектов искусственно создаваемых звуковых сигналов (активная локация). Под термином "Г." понимают исключительно звуковую локацию, поскольку звуковые волны являются единственным известным в настоящее время видом волн, распространяющихся в морской среде без значительного ослабления. Г. имеет большое значение в навигации для обнаружения невидимых подводных препятствий, при рыбной ловле для обнаружения косяков и отдельных крупных рыб, в океанологии как инструмент исследования физических свойств океана, картографирования морского дна, поиска затонувших судов и т.п., а также в военных целях для обнаружения подводных лодок, надводных кораблей и др. и наблюдения за ними, для определения координат целей при применении торпедного и ракетного оружия.
При пассивной локации (шумопеленгации) с помощью Шумопеленгатора определяют направление на источник звука (пеленг источника), пользуясь звуковым полем, создаваемым самим источником. При этом применяют различные методы: поворачивают приёмную акустическую антенну с острой направленностью до положения, в котором принятый сигнал имеет максимальную интенсивность (т. н. максимальный метод пеленгования); измеряют разность фаз между сигналами на выходе двух разнесённых в пространстве антенн (фазовый метод); определяют относительную разницу во времени приёма сигналов двумя разнесёнными антеннами посредством измерения взаимной корреляции (См. Корреляция) (корреляционный метод), а также путём комбинации этих методов. При пассивной локации расстояние до объекта определяют по двум или нескольким пеленгам, полученным несколькими приёмными системами, разнесёнными на расстояния, сравнимые с расстоянием до лоцируемого объекта (метод триангуляции); так определяется не только положение шумящего объекта, но и траектория его движения. Системы пассивной Г. применяются главным образом для гидроакустического оснащения подводных лодок и надводных кораблей. Пассивной Г. пользуются также при обнаружении подводных шумящих объектов с помощью распределённых береговых и донных систем звукоприёмников, данные от которых по подводному кабелю передаются на береговые системы обработки, а также с помощью системы гидроакустических радиобуев, информация от которых принимается по радиоканалу специальными самолётами, курсирующими в районе плавания буев. Кроме того, пассивное определение направления на шумящий объект является основой действия акустических самонаводящихся торпед.
Если источник звука излучает короткий звуковой импульс, то положение источника можно определить по разностям времён прихода импульсов, принятых ненаправленными приёмниками в трёх или более разнесённых по пространству пунктах. Таким способом локализации источников пользуются в береговой системе дальнего обнаружения судов, терпящих бедствие в открытом океане (система СО ФАР); источником звука при этом служит взрыв заряда, погружаемого на определенную глубину.
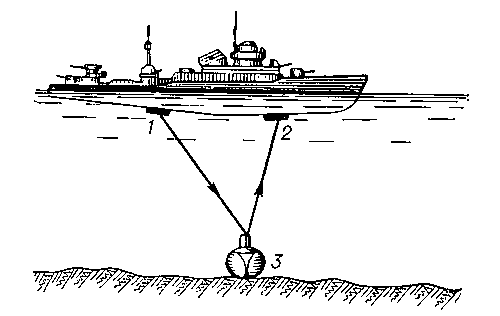
Системы активной Г. основаны на явлении звукового Эхо (рис.) и различаются методами временной модуляции (См. Модуляция) посылаемого сигнала и способами обзора пространства. Для определения дальности объекта чаще всего пользуются импульсной, частотной и шумовой модуляциями сигнала. При импульсной модуляции расстояние R до цели находится по времени запаздывания t0 отражённого импульса: R=ct0/2, где с - скорость распространения звука в среде. При частотной модуляции частота f излучаемого сигнала меняется со временем t по линейному закону f (t)=f0+γt, где f0 и γ - постоянные начальная частота и скорость изменения частоты. Поэтому отражённый сигнал, принятый приёмником, будет отличаться по частоте от сигнала, излучаемого в данный момент, т.к. принятый сигнал представляет собой задержанную на время t0 копию посланного сигнала, а частота излучаемого сигнала за время t0 изменилась согласно приведённой формуле. Для неподвижной цели разность частот будет постоянной и равной f_ = γt0. Выделив разностную частоту, определяют расстояние до цели R по формуле R=cf_/2γ. Аналогична схема действия Гидролокатора с шумовым излучением и корреляционной обработкой сигнала.
Основной характеристикой гидролокаторов является дальность обнаружения, которая зависит от мощности излучаемого сигнала, от уровня акустических помех и от условий распространения звука в водной среде. Дальность обнаружения обычно определяют по величине т. н. порогового сигнала, т. е. сигнала минимальной интенсивности, ещё различимого на фоне помех. Если помеха и сигнал независимы, то пороговый сигнал определяется отношением полной энергии полезного сигнала к мощности помехи в данном частотном интервале. Т. о., дальность обнаружения для систем с различными видами модуляции будет одинаковой, если одинакова их полная энергия излучения. Если основная помеха - хаотическое отражение сигнала от неоднородностей среды (т. н. реверберационная помеха), то пороговый сигнал не зависит от мощности излучаемого сигнала, а определяется исключительно шириной полосы его частот; в этом случае более эффективны системы с частотной модуляцией сигнала и с шумовой посылкой.
Наряду с помехами на дальность обнаружения оказывает влияние рефракция, имеющая место в сложных гидрологических условиях. Современные гидролокаторы способны обнаруживать большие отражающие объекты в среднем на расстоянии нескольких км.
Лит.: Клюкин И. И., Подводный звук, Л., 1963; Сташкевич А. П., Акустика моря, Л., 1966; Тюрин А. М., Сташкевич А. П., Таранов Э. С., Основы гидроакустики, Л., 1966.
Б. Ф. Курьянов.
Принцип работы гидролокатора: 1 - излучатель; 2 - приёмник; 3 - отражающее тело.
Wikipedia
Гидролокатор

Гидролока́тор, сона́р (англ. sonar, аббр. от SOund Navigation And Ranging) — средство звукового обнаружения подводных объектов с помощью акустического излучения.